

Nguyên lý hoạt động, ưu và nhược điểm của khởi động trực tiếp và sao tam giác
Các phương pháp khởi động động cơ
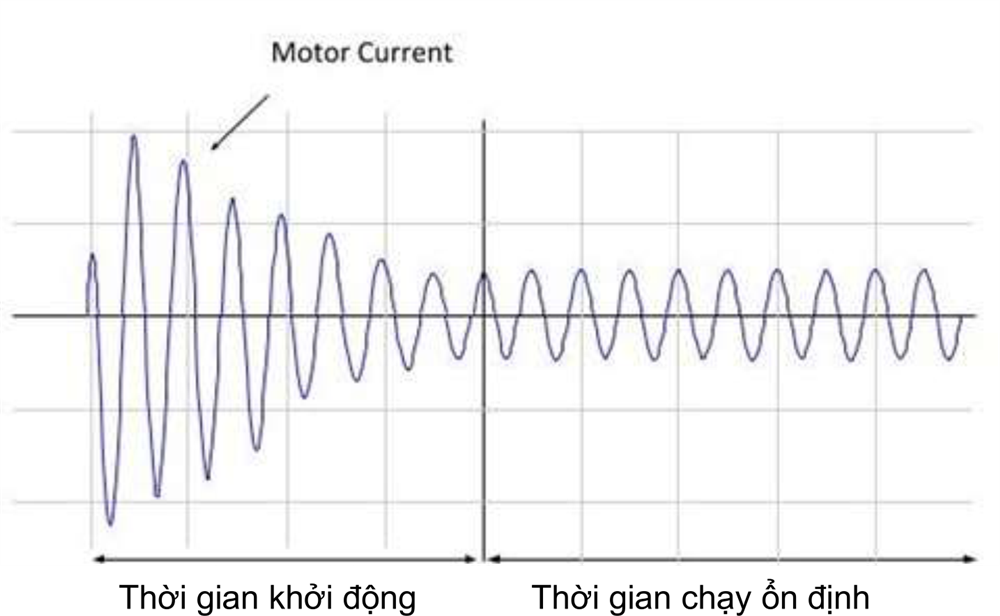
Thời gian khởi động động cơ, dòng khởi động và quá trình quá độ
Thời gian khởi động động cơ là khoảng thời gian từ khi nguồn điện được nối với động cơ đến khi động cơ tăng tốc đến hết tốc độ. Độ dài của khoảng thời gian bắt đầu phụ thuộc vào sự kết hợp của động cơ và tải trọng cơ học, và nó có thể dài từ một phần giây đến 30 giây hoặc lâu hơn.
Cần có mức dòng điện cao trong giai đoạn khởi động, và chúng có thể gây ảnh hưởng bất lợi đến hệ thống cung cấp điện và các thiết bị khác được kết nối với nó. Thời gian bắt đầu quá độ phụ thuộc vào đặc tính tải và thời gian động cơ chạy đến tốc độ định mức.
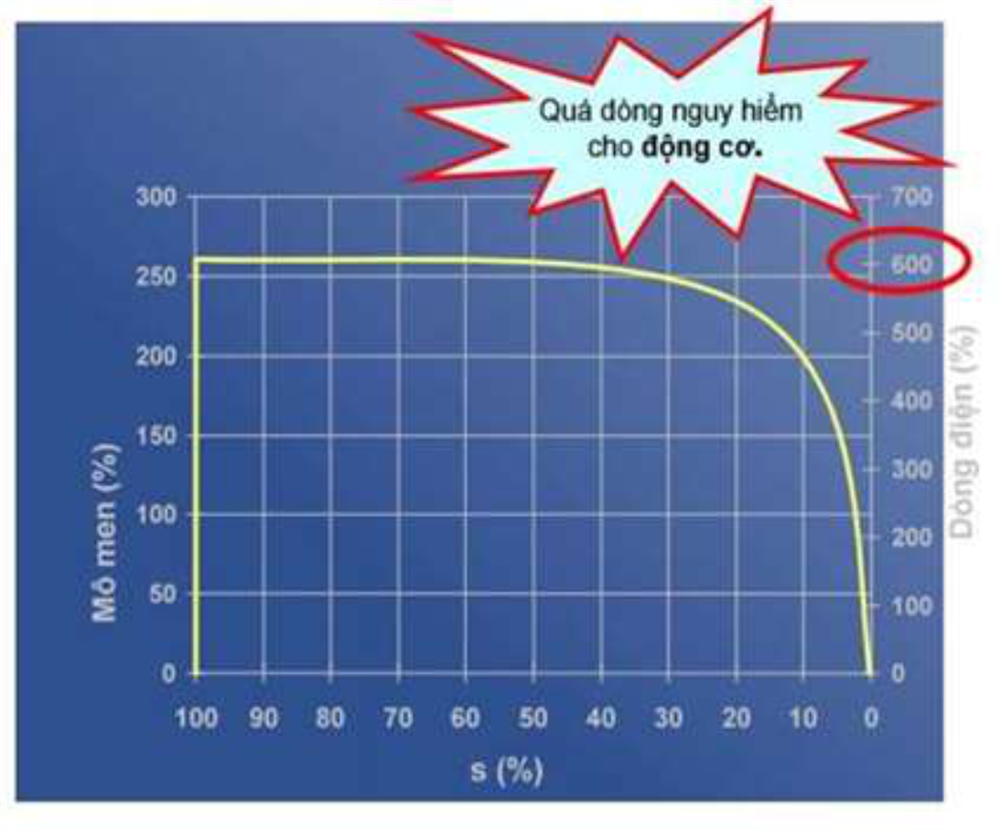
Trong thời gian khởi động, dòng điện lớn hơn đáng kể so với dòng điện chạy đầy tải bình thường của động cơ được tạo ra, từ trường bên trong động cơ và EMF tăng trở lại và tải cơ học tăng tốc. Dòng khởi động có thể cao gấp 5-8 lần dòng đầy tải (định mức).
Khởi động trực tiếp DOL
Là phương pháp khởi động đơn giản nhất, chỉ việc đóng động cơ điện vào lưới điện với điện áp thích hợp là được:
Ưu điểm:
• Mở máy nhanh.
• Thiết bị khởi động đơn giản -> giá thành rẻ
• Mômen khởi động lớn (0,6 đến 1,5).Tn
Nhược điểm:
• Dòng khởi động động cơ lớn (gấp 5-8xIn) -> ảnh hưởng bất lợi tới nguồn điện.
• Nếu quán tính của tải lớn, thời gian khởi động kéo dài -> gây sụt áp trên lưới, làm động cơ nóng nên.
• Sốc và hao mòn cơ khí khi khởi động
Ứng dụng:
Các máy truyền động, máy công cụ công suất nhỏ, thường khởi động có tải. Phương pháp khởi động trực tiếp được ứng dụng cho các lực quán tính nhỏ như tâm, tiện, bơm ly tâm, máy mài, máy khoan cần …
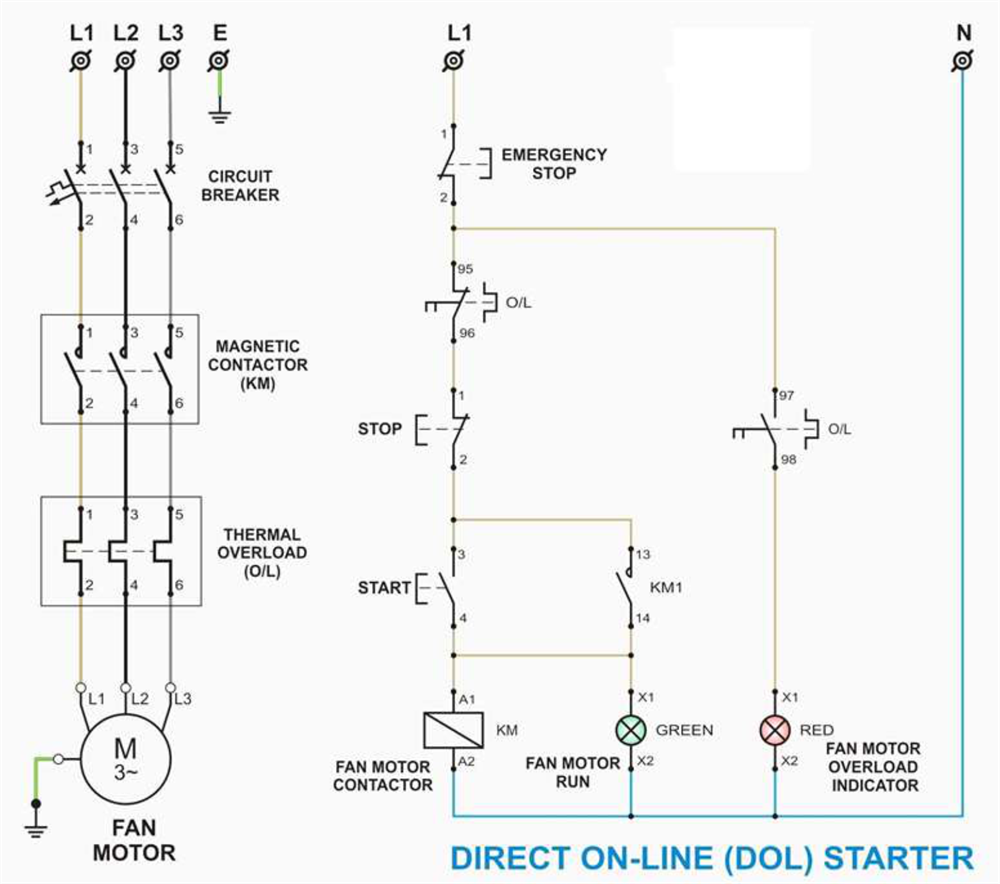
Khởi động trực tiếp DOL
Nguyên lý mạch:
• Đóng CB cấp điện cho mạch động lực; đóng MCB cấp điện cho mạch điều khiển.
• Nhấn nút khởi động START, dòng điện xuống cuộn hút của contactor KM (A1-A2) làm tiếp điểm thường hở của contactor KM (13-14) đóng lại trở thành tiếp điểm duy trì dòng điện, động cơ bắt đầu quay;
• Nhấn nút dừng STOP, động cơ từ từ dừng lại.
• Khi xảy ra sự cố quá tải, tiếp điểm (95-96) của Relay nhiệt hở ra, đồng thời tiếp điểm (97-98) của đóng lại; đèn RED sáng báo hiệu hệ thống đang gặp sự cố quá tải, kẹt rotor,…
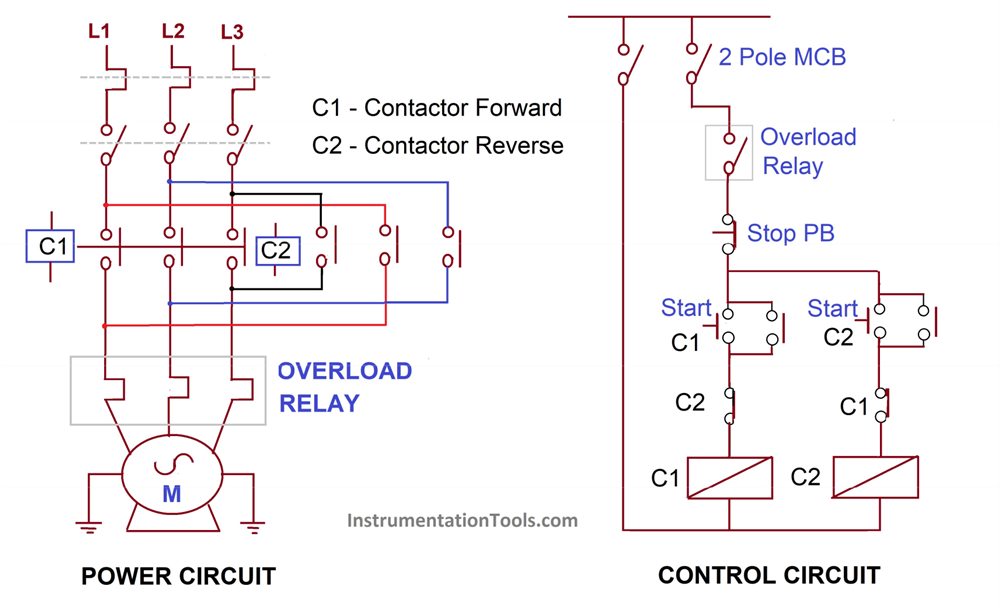
Khởi động trực tiếp DOL có đảo chiều
Nguyên lý mạch:
• Đóng CB cấp điện cho mạch động lực; đóng MCB cấp điện cho mạch điều khiển.
• Nhấn nút khởi động START C1, dòng điện xuống cuộn hút của contactor C1 (A1-A2) làm tiếp điểm thường hở của contactor C1 (13-14) đóng lại trở thành tiếp điểm duy trì dòng điện, động cơ bắt đầu quay thuận;
• Nhấn nút dừng STOP, động cơ từ từ dừng lại.
• Nhấn nút khởi động START C2, dòng điện xuống cuộn hút của contactor C2 (A1-A2) làm tiếp điểm thường hở của contactor C2 (13-14) đóng lại trở thành tiếp điểm duy trì dòng điện, động cơ bắt đầu quay ngược;
• Khi xảy ra sự cố quá tải, tiếp điểm (95-96) của Relay nhiệt hở ra để bảo vệ động cơ
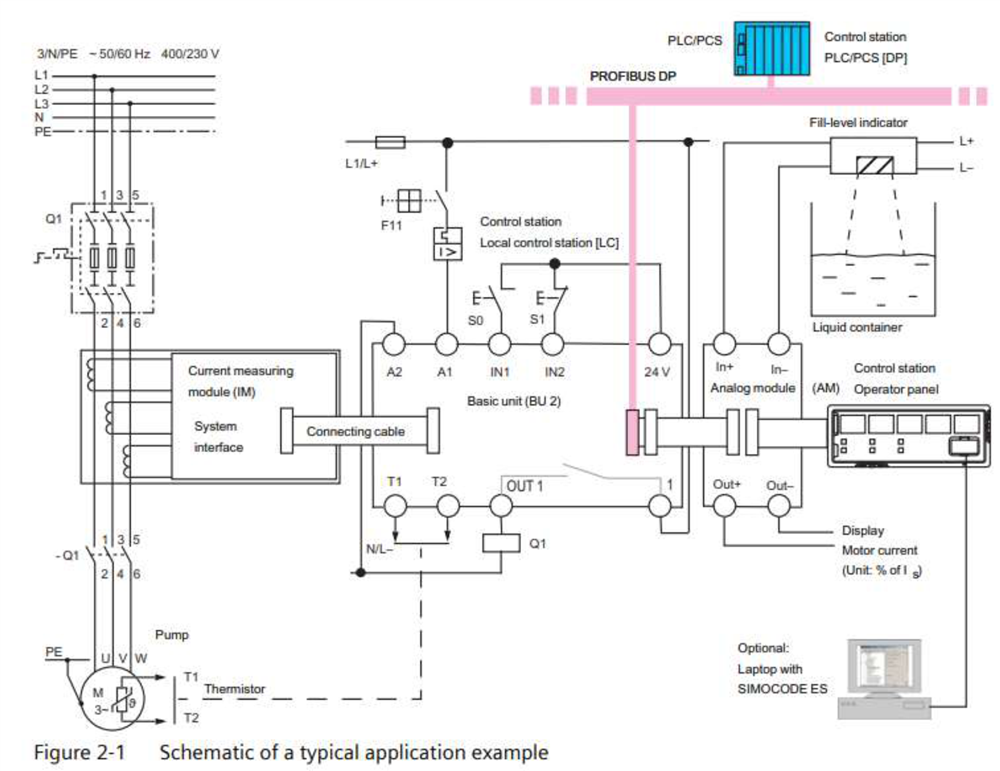
Khởi động trực tiếp DOL từ SCADA/DCS qua SIMOCODE
Nguyên lý mạch:
SIMOCODE pro (SIRIUS Motor Management and Control Devices) là hệ thống quản lý động cơ mô- đun và linh hoạt dành cho động cơ hạ thế có tốc độ không đổi
SIMOCODE pro tích hợp chỉ trong một hệ thống:
Tích hợp công nghệ an toàn để vận hành hệ thống an toàn
Truyền thông qua PROFIBUS DP, PROFINET IO, Modbus RTU, OPC UA, EtherNet/IP và web server
Dữ liệu chi tiết về hoạt động, dịch vụ và chẩn đoán
Mở rộng chức năng điều khiển động cơ
Đa chức năng, đầy đủ các chức năng bảo vệ động cơ
Dễ dàng cấu hình với SIMOCODE ES
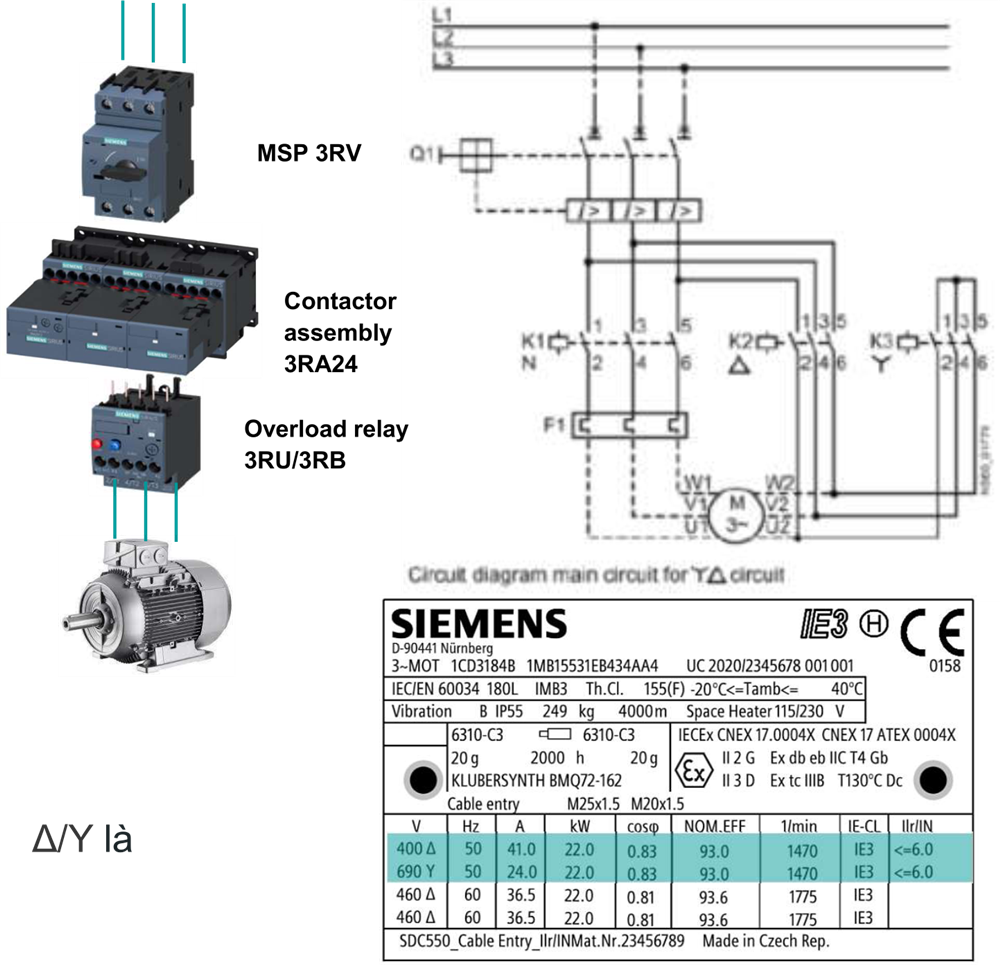
Khởi động sao-tam giác S/D
Đặc điểm:
Động cơ ban đầu động cơ chạy ở chế độ nối dây kiểu sao (Y) sau một thời gian sẽ chuyển sang chế độ nối dây kiểu tam giác (Δ)
Ưu điểm
• Dòng, mômen khởi động bằng 1/3 lần so với khởi động trực tiếp
• Chi phí không quá cao, vận hành và lắp đặt dễ dàng
Nhược điểm
• Đối với động cơ lớn khi dừng đột ngột dễ phá hỏng các thành phần cơ khí
• Nếu tải của động cơ là quá lớn thì phương pháp này không đủ mô men xoắn để đẩy nhanh tốc độ động cơ trước khi chuyển sang chế độ tam giác.
• Momen tải cao hơn 50% momen danh định của động cơ sẽ không thể sử dụng khởi động bằng đổi nối sao-tam giác.
Ứng dụng:
• Áp dụng cho những động cơ khi làm việc đấu tam giác.
• Động cơ chạy không tải hoặc tải nhỏ (bơm ly tâm, quạt...)
Lưu ý: Với điện lưới 3P, 380V (hoặc 400V), động cơ phải có thông số Δ/Y là 380/660V (hoặc 400/690V) thì mới dùng được phương pháp này, lưu ý khi ký hiệu Y/ Δ là 220/380 thì chúng ta không dùng khởi động Y/D được.
Các phương pháp khởi động động cơ
• Khi sử dụng đồng hồ đo điện ở 2 pha bất kỳ, ta đều thu được thông số 400V. Đây gọi là điện áp dây.
• Với sơ hồ hình tam giác, như trên hình vẽ ta thấy điện áp giữa 2 đầu cuộn dây chính bằng điện áp dây. Vì thế ta đo được U = 400V.
• Trong cuộn dây có một điện trở R = 20 Ôm, vì thế ta đo được dòng điện qua cuộn dây là I = 400/20 = 20 (A).
• Theo công thức tính dòng điện ta thu được Idây = √3 * 20 = 34,6A
• Khi ta đo điện áp giữa 2 pha bất kỳ, vẫn thu được thông số là 400V.
• Tuy nhiên, với cách đấu hình sao, điện áp giữa 2 đầu của một cuộn dây bất kỳ là 400V/√3=230V.
• Khi đó, dòng điện qua cuộn dây là 230/20=11,5 (A)
• Dòng qua mỗi cuộn dây chính là dòng điện qua các pha. Do đó Ipha=11,5A
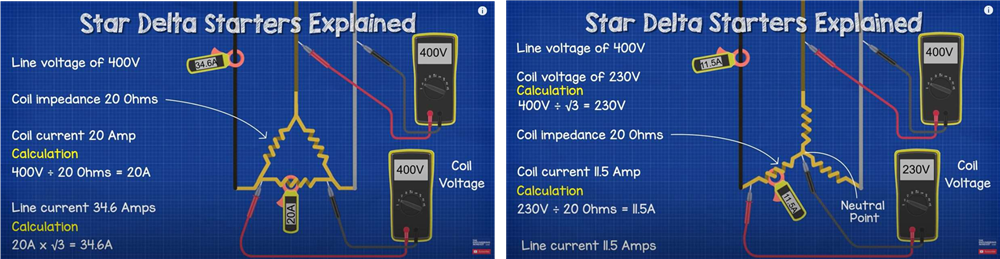
Qua so sánh ta thấy dòng điện sử dụng cho động cơ khi đấu tam giác gấp 3 lần so với đấu sao.
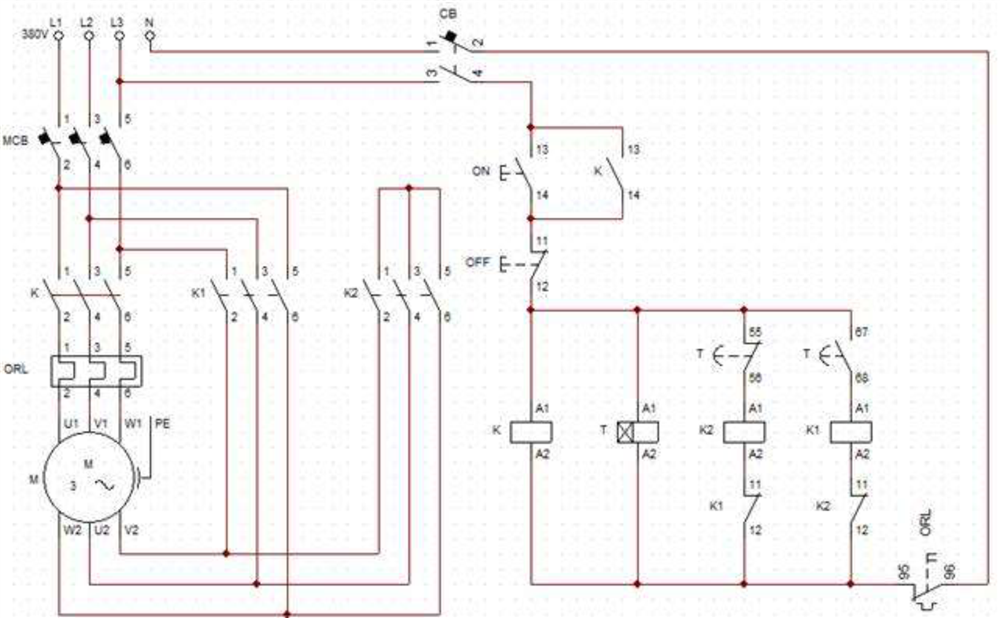
Khởi động sao tam giác Y/D
Mạch sử dụng 1 cặp nút nhấn ON, OFF để điều khiển chạy dừng động cơ, dùng timer hẹn giờ để chuyển mạch tự động. Chỉnh thời gian chuyển mạch tùy thuộc vào thời gian động cơ tăng tốc, phụ thuộc vào tải.
• Khi nhấn nút ON thì contactor K và K2 đóng ngay lập tức, động cơ lúc này chạy chế độ hình sao. Thường đóng của K đóng lại giữ trạng thái của nút nhấn ON, đồng thời lúc này cuộn dây của timer được cấp điện nên bắt đầu đếm giờ.
• Khi timer này đếm đến thời gian đã cài đặt trước đó thì tiếp điểm thường đóng T mở ra ngắt điện contactor K2. Đồng thời tiếp điểm thường hở T đóng lại kích đóng cuộn K1. Động cơ sẽ chạy chế độ tam giác.
• Khi nhấn nút OFF thì dù động cơ chạy chế độ nào cũng đều giảm tốc đến khi ngừng quay.
• Khi động cơ bị quá tải thì rơ le nhiệt tác động, làm mở tiếp điểm thường đóng của nó ở mạch điều khiển. Do đó các cuộn dây contactor mất điện nên động cơ ngừng quay.
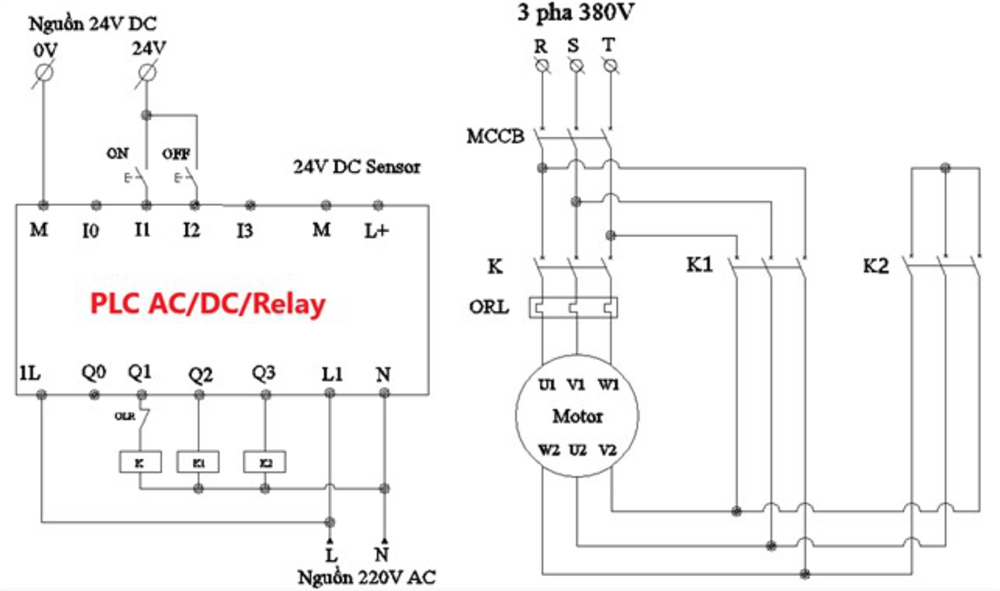
Khởi động sao tam giác Y/D bằng PLC
Nguyên lý mạch:
Ưu điểm của mạch khởi động sao tam giác dùng PLC là mạch điều khiển đơn giản, không cần thay đổi phần đấu dây, độ tin cậy cao. Tuy nhiên giá PLC cao nên làm tăng chi phí cho mạch, phải có kiến thức về lập trình PLC. Ta có thể kết hợp với ứng dụng khác khi dùng PLC.
• Ngõ vào PLC đọc trạng thái hai nút nhấn ON và OFF ở hai chân I1 và I2.
• Ngõ ra PLC điều khiển 3 contactor K, K1 và K2 với các ngõ ra tương ứng Q1, Q2, Q3. Tiếp điểm thường đóng rơ le nhiệt ORL sẽ nối tiếp với cuộn dây của contactor K.
Khởi động sao tam giác Y/D bằng PLC
Chương trình trên PLC
Chương trình trên PLC hoạt động như sau:
• PLC sẽ đọc trạng thái hai nút nhấn Start, Stop. Khi nhấn nút Start thì Q1 sẽ bật, cuộn K được cấp điện nên contactor K đóng.
• Q1 bật thì kéo theo Q2 bật, làm cho contactor K2 đóng nên động cơ chạy chế độ sao. Đồng thời khi Q1 bật thì Timer T1 bắt đầu đếm thời gian.
• Khi T1 đếm đến thời gian đặt trước 5s thì tiếp điểm thường đóng T1 mở ra làm cho K2 mở. Đồng thời tiếp điểm thường hở T1 đóng lại bật ngõ ra Q3 nên cuộn K1 hút, động cơ chạy chế độ tam giác.
• Khi nhấn nút OFF thì Q1 tắt, mạch ngừng hoạt động.
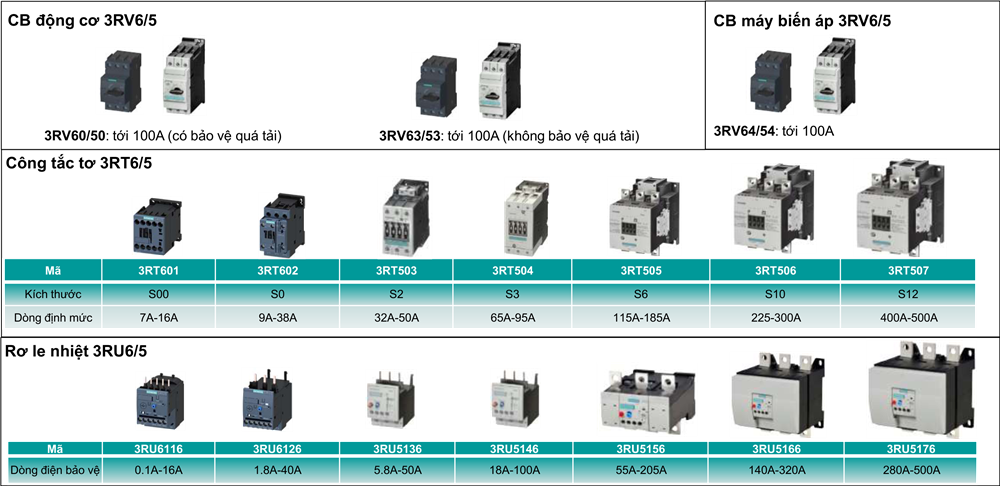
Các thiết bị khởi động và bảo vệ động cơ
Tổng quan về thiết bị
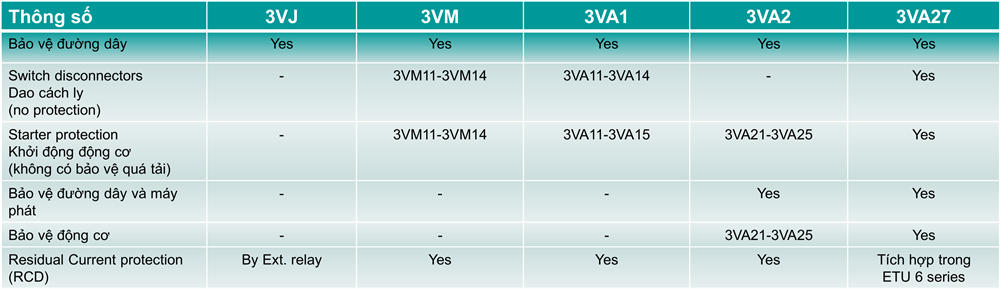
Ứng dụng của MCCB 3VJ, 3VM, 3VA
<a href=https://propecia2buy.top/>finasteride 1mg tablets for sale</a> and Wallington, E
Not trying for twins, but I just wanted to say the BFP can happen on the first try <a href=https://propecia2buy.top/>propecia for hair loss</a>